树蛙脚掌的多级微纳界面湿增摩效应规律研究
威廉希尔公司陈华伟课题小组在仿生湿润滑表面取得重大突破,研究成果发表于Advanced Science
精准医疗已列入我国“十三五”规划的重点内容,生/机界面功能化成为精准医疗的重要课题。精准医疗器械与软组织的湿滑接触中,湿滑接触界面打滑不可避免,甚至会引起不必要的麻烦。例如,外科医生常采取“宁紧勿松”的夹持策略防止手术夹持滑脱,造成夹持过载,引起软组织损伤;风靡全球的可穿戴柔性传感器在皮肤冒汗后会出现测试精度下降甚至脱落失效。
为了提升湿滑生/机界面的粘附或摩擦性能,师法自然,人们基于章鱼真空吸盘结构、树蛙脚垫结构等已创新性地提出了许多新方法、新结构,成功应用于精准医疗生/机界面上。尤其,树蛙作为一种生活在湿环境的两栖生物,其脚掌可在无需额外压力下产生强湿粘附/湿摩擦,借助树蛙脚垫的强湿摩擦策略,人们已研制出仿生剃须刀、仿生防滑夹钳等。然而,在生/机接触过程中,界面液膜在树蛙脚垫结构上的动态行为规律、及微纳液桥形成机制等却很少涉及。
北京航空航天大学陈华伟教授课题组,在江雷院士、雒建斌院士和张德远教授指导下,表征了树蛙脚掌表面的微纳多级六棱柱及纳凹坑结构,发现了生/机接触过程中微纳特征结构/材质协同作用下的两种特殊液膜界面效应,即法向碎化效应、纳凹坑自吸附效应。揭示了两种界面效应对界面毛细力、微纳液桥形成的影响规律,建立了强湿摩擦增效理论模型,提出了强湿摩擦表面仿生设计方法,并将其应用到仿生手术夹钳、仿生可穿戴传感装置上,验证了湿增摩有效性(图1)。张力文博士作为第一作者,陈华伟教授为通讯作者发表于《Advanced Science》,Adv. Sci. 2020, 2001125。

图1 精准医疗的生/机界面
本文通过表征树蛙脚掌,发现其表面覆盖着微纳多级棱柱阵列,且每个纳米棱柱顶部都有纳米凹坑结构。为了揭示界面液膜的行为机制,师法自然设计制备出多种仿生多级结构表面,模仿模仿树蛙爬行行为,对树蛙脚掌和仿生表面进行了连续抬步摩擦测试(FLC),两者表现出了极其相似的界面液膜状态和摩擦力变化规律(图2)。即,随着抬步数增加,界面粘液逐渐减少,由湿变干过程中会出现一个摩擦力峰值,与湿、干状态相比增大超20余倍,明显有别于传统机械表面摩擦。
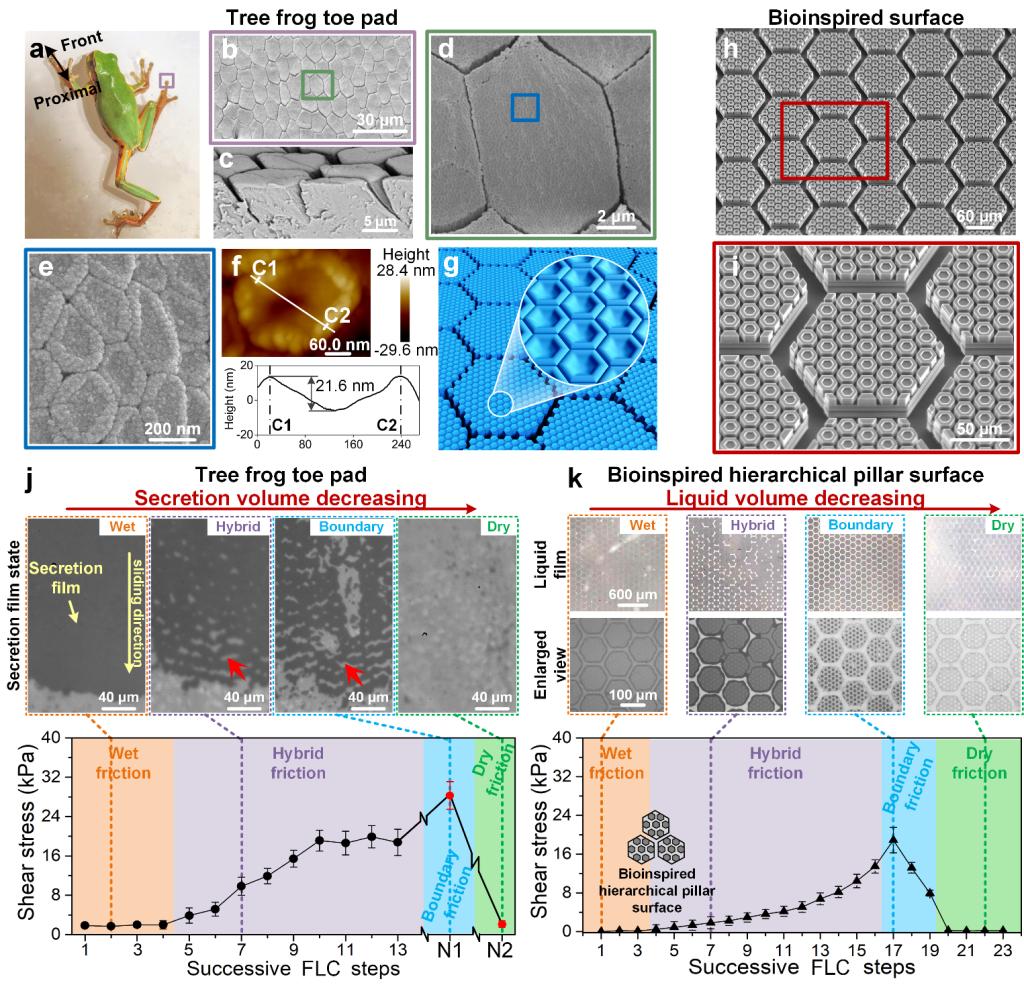
图2 树蛙脚垫结构表征
进一步对表界面液膜原位表征,发现密排棱柱结构在抬步的过程中会自发将液膜从沟槽内均匀地分裂开,使液体运动并停留在每个棱柱表面上,即液膜自碎化。随着界面液量减少,这种液膜分裂行为会依次出现在第一、二级棱柱表面上,达到两级液膜自碎化效应(图3),从而能使液膜能够均匀地分布于整个仿生表面。

图3 液膜多级碎化
为揭示碎化后界面液膜对棱柱的作用规律,与清华大学雒院士团队马丽然老师合作通过实时动态观测薄膜干涉条纹变化来估算出界面液膜厚度。经估算,棱柱界面液膜最薄可低于200nm,可形成7倍大气压吸附力使棱柱紧紧贴合基底表面(图4)。这就可说明树蛙脚垫即使在没有外压力作用下,仍能够产生极强湿摩擦。
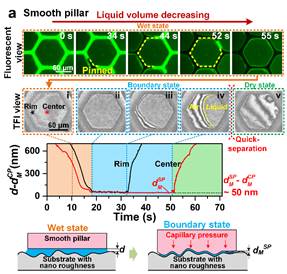
图4 液膜实时观测
当棱柱顶部有凹坑时,棱柱顶面的纳米液膜毛细力依然作用于整个表面,而固-固作用力仅集中于棱柱外侧的凹坑边缘,从而能够在边缘形成更薄的纳米液膜(图5)。干涉条纹表征可知,凹坑棱柱表面液膜比光滑棱柱表面的液膜薄约50 nm,从而有助于形成更强的毛细力和强湿摩擦,达到凹坑增强效果。针对仿树蛙脚垫微纳结构的湿增摩界面效应,进一步提出了两个湿增摩因子,即液膜自碎化增强因子和纳凹坑自吸附增强因子。
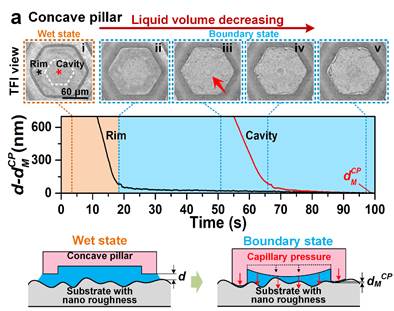
图5 凹坑自吸附效应
针对手术夹钳和可穿戴传感生/机表面的湿滑脱问题,引入仿树蛙脚掌强湿摩擦机制,实验结果表明可以有效增强夹钳在低夹持力下的摩擦力并减小组织变形量,降低组织损伤率,增强可穿戴传感表面对皮肤汗液承受性能,提高传感精准度(图6)。
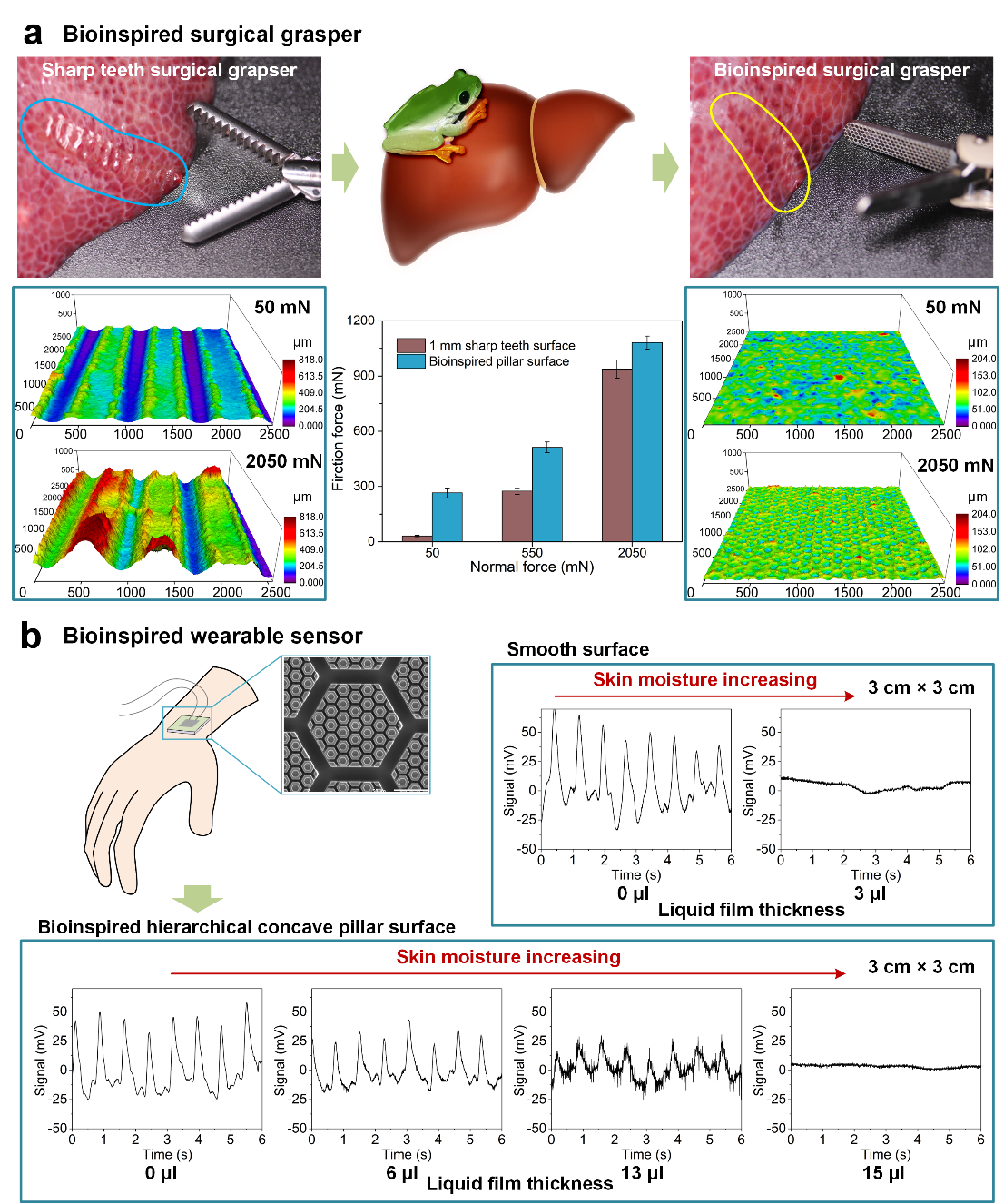
图6 强湿摩擦仿生表面应用
综上,本文揭示了树蛙脚掌利用其微纳多级结构形成的独特界面液膜调控作用,发展出液膜自碎化增效和凹坑自吸附增强效应,通过在界面间形成的纳米液膜的强毛细吸附作用,达到了无外压力下产生强湿边界摩擦的效果。本研究为湿粘附增强提供了一种新的方案,为实现精准医疗、可穿戴传感等领域的接触增强提供了新思路和新方法。
论文信息:
Micro–Nano Hierarchical Structure Enhanced Strong Wet Friction Surface Inspired by Tree Frogs
Liwen Zhang, Huawei Chen*, Yurun Guo, Yan Wang, Yonggang Jiang, Deyuan Zhang, Liran Ma, Jianbin Luo, Lei Jiang
论文链接:http://dx.
