万物有灵
世间奥秘蕴藏在瑰丽的大自然里
人类认知自然、师法自然
一步步探寻着前行的方向
这就是仿生的意义
2023年11月30日
国际权威期刊《科学·机器人》
报道了北京航空航天大学
威廉希尔公司
仿生机器人研究团队
与清华大学,新加坡国立大学合作
在仿生柔性机械臂领域
取得的新进展
这种融合柔性电子的仿生机械臂
具有极高的自由度
能够像章鱼一样抓捕物体
为应对复杂环境下的机械作业
提供了新的方案
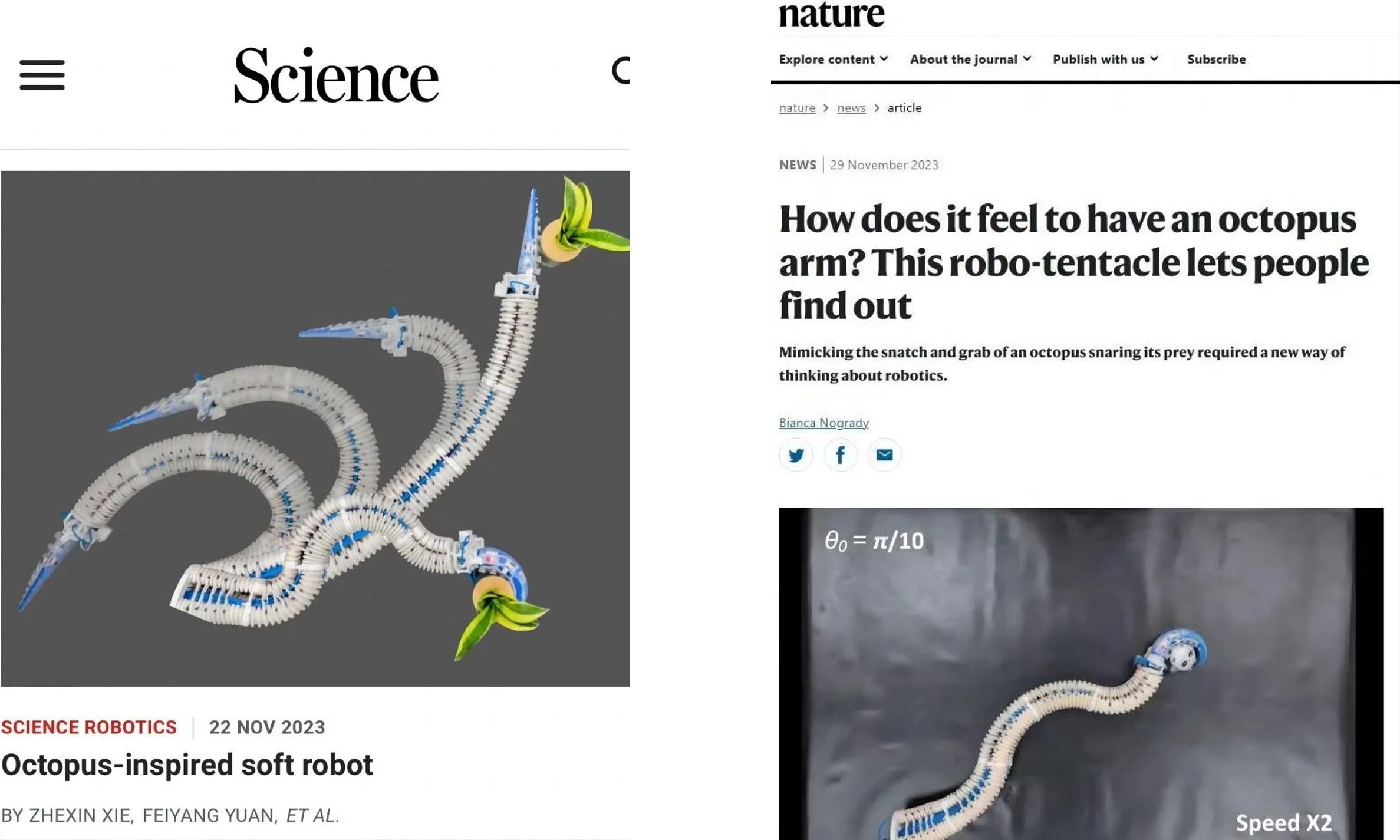
成果发布后
被Science官网图片报道
同时被Nature官网News撰文报道
来自“章鱼臂”的灵感
从人类制成的第一把石斧、第一个轮子到第一艘船舶,从鲁班受芒草启发发明锯子到列奥那多·达·芬奇研究鸟的身体构造制作扑翼机,再到今天的AI神经网络、蚁群算法,无一不印证着仿生的魅力。那些令我们头痛的技术难题,大自然早已给出答案。这项研究成果便是从章鱼臂中得到了灵感。
软体连续体机器人的建模、感知及控制是机器人领域面临的一项重要挑战。软体连续体本身具有较高的自由度和冗余度,对其非线性偏微分方程模型进行数值近似求解的速度和精度难以同时保证。而软体连续体的环境感知则存在着传感电路与机器人本体杨氏模量(<1Gpa)匹配难、功能结构分布设计难等问题。
章鱼被誉为最聪明的无脊椎动物,也被称为海洋中的灵长类。它的触手十分灵巧,触手所及之空间,皆为章鱼所掌控,这些惊人的功能为软体机器人的研发提供了重要的思路。章鱼在抓捕猎物过程中,其细长的触手采用一种“弯曲波传递”的模式接近目标,利用高灵敏度的触手/吸盘神经进行感知并快速捕获目标。模仿生物章鱼的这种独特的捕食行为,可为软体连续体机器人的感知和与环境交互提供参考。
探秘章鱼臂的抓捕机制
早在2015年,文力课题组就开启了关于仿生章鱼臂的研究。起初,他们将目光聚焦于章鱼臂的末端部分,就“章鱼触手如何吸附、如何抓取”这个问题一探究竟,发现触手末端必须有一定的锥度才能“手到擒来”。而在大范围、大空间的应用场景中,仅靠触手末端是远远不够的。为了使机械臂可以真的像章鱼一般“心灵手巧”,团队开展了更进一步的研究。
于是,研究团队购买了多批章鱼,在实验室人工创设出海水环境,精心培育、耐心观察,逐渐熟知章鱼的生物习性,并通过高速相机等专业设备进行观测,获取生物运动学数据,然后探索数据背后章鱼抓捕物体的具体机制。
章鱼对生存环境要求苛刻,充足的氧气、良好的水质和充足的资源才能让章鱼“宾至如归”。除此之外,章鱼又好奇心满满,一不留神就“溜出缸外”,离开适宜的环境后很快就会死亡。观测数据同样不易获取,章鱼并不会一直做出研究所需要的抓捕动作。负责生物章鱼捕食观测的博士生陈勃翰说:“章鱼有比较明显的情绪特征,抓捕动作得看章鱼心情,不仅要琢磨好章鱼的性子,还得持之以恒进行观察”。

图1:生物章鱼观测


图2:生物章鱼臂的趋近(Reaching)模式和扫掠(Sweeping)模式
根据生物章鱼的观测数据,课题组发现,章鱼触手的抓捕动作采取“弯曲波传递”的方式,“很像我们挥舞长鞭,指令从鞭子根部像波一样传导到末端”,然后通过高度敏感的触手/吸盘神经网络触发停止和抓取信号,对物体进行抓取并拉回。
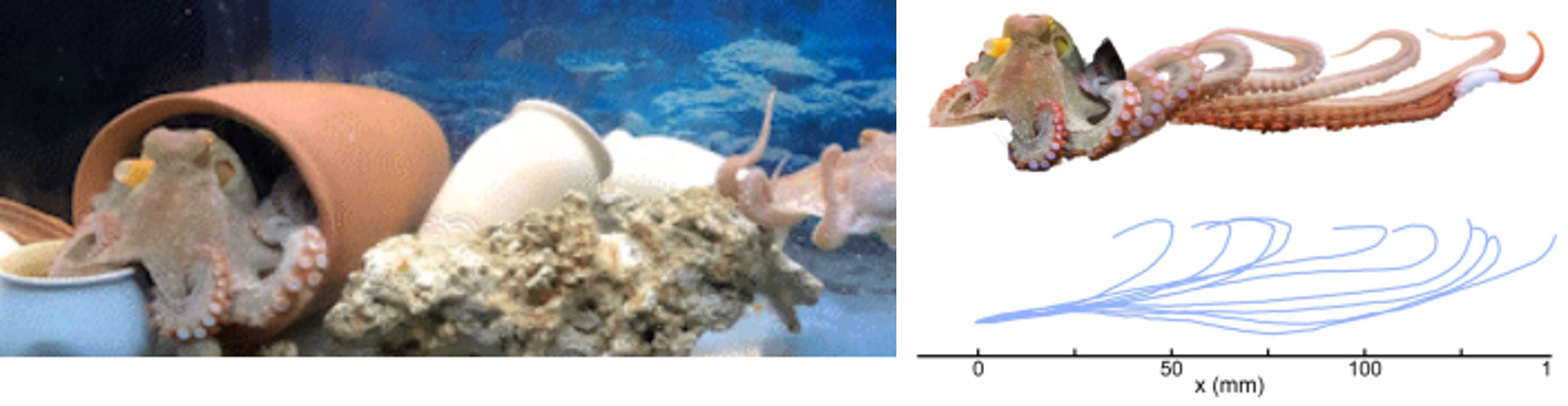
图3:章鱼触手的“弯曲波传递”抓捕动作
攻克三大研究难关
尽管章鱼臂抓捕机制已经明晰,然而距离实现和章鱼臂一样能够自主感知环境、作出决策并执行操作的软体机器人系统,研究团队还需要攻克三大难关。
一、“弯曲波传递”模型
第一个难关是如何通过数学建模的方式将章鱼臂的“弯曲波传递”抓捕机制应用到自主研制的仿生章鱼臂样机控制中。建模的第一步是用简洁的数学语言搭建生物学模型,从机器人控制的角度,要求不能建立结构过于复杂的模型。第二步是构建具有连续体构型特点的机器人模型。由于仿生章鱼臂样机有5个关节,16个自由度,其冗余自由度要远高于刚性机械臂。此外,机器人驱动器主要由柔性材料构成,其材料特有的超弹性特征也对机器人的建模与控制提出很高的要求。
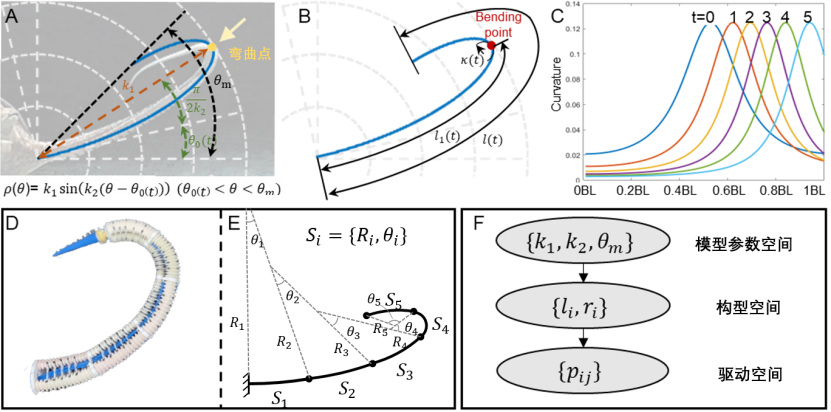
图4:仿生章鱼臂的“弯曲波传递”模型
研究团队经常聚在一起头脑风暴,许多奇思妙想就是这样诞生的。在解决数学建模的问题上,博士生刘嘉琦巧妙引入玫瑰线方程,以简洁而美观的形式进行了刻画。玫瑰线方程源于中世纪航海罗盘,形似玫瑰,在极坐标下只有α、k、θ三个变量,和弯曲波传递的运动轨迹有极高的吻合度。在这一模型的指导下,仿生章鱼触手抓持器与多段软体臂的组合可以在大范围、不同方向和距离的情况下自动进行抓捕操作。
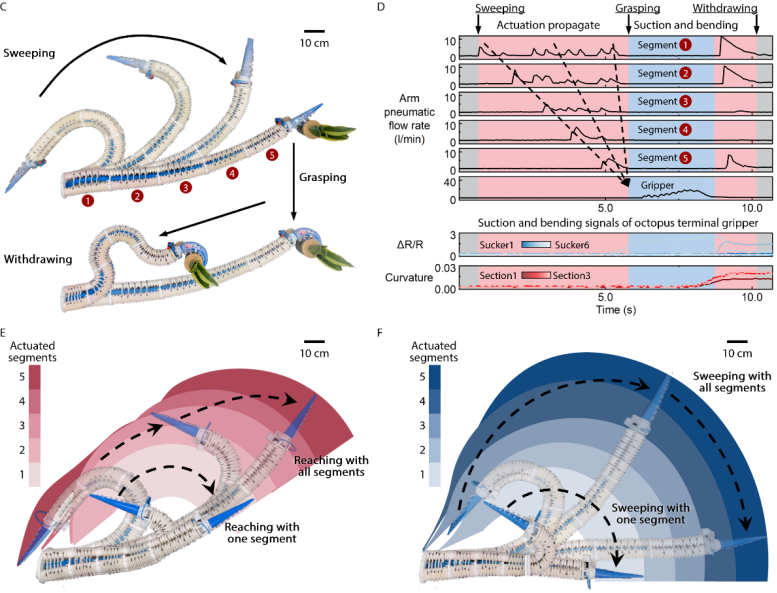
图5:传递式驱动逻辑下的“弯曲波传递”目标物抓捕

二、集成液态金属电子系统
如何实现机器人在高柔顺大拉伸状态下对自身状态及外部环境的精准感知,这是面临的第二个难关。人类只有一个大脑,而章鱼足足有九个,每一条章鱼臂上也有自己的神经系统。章鱼触手通过吸盘感知到接触的物体时,会迅速缠绕,然后将信号传导到触手的大脑中进行控制,这是生物中的一种分布式智能。章鱼的触手极为灵敏,所有可以扫到的地方都是章鱼的抓捕空间,这与章鱼独立控制的方式带来的高效决策、迅速抓捕是分不开的。负责仿章鱼神经感知系统的博士生袁菲阳提到,“我们希望机械臂可以像章鱼触手一样,有自己的神经系统。”
生物章鱼臂的形变程度可以达到200%—300%,不仅可以拉伸,还可以自如地收缩、弯曲、膨胀。传统刚性电路板制成的机器人难以实现这些力学性能,因此,研究团队采用液态金属柔性电路,为大变形软体机器人集成具有多种传感(例如弯曲、吸力、温度)及自主信号处理能力的大拉伸电子系统。在此期间,团队还解决了柔性基底与硬质芯片在大拉伸状态下易产生剥离的问题,通过嵌入中间硬度的缓冲材料,有效地降低了芯片连接面处的应变,提高了柔性电路的拉伸率。经过增强后,简单柔性电路单元在拉伸至710%的状态下仍能正常工作,对于集成传感以及电子元件的复杂电路,其拉伸性也从140%提升到了360%。

图6:柔性电路单项拉伸测试

图7:集成液态金属电子系统的仿生章鱼触手抓持器
这种增强的柔性电路不仅能够在单一轴上承受大幅拉伸应变,而且还具备对多轴拉伸应变的适应能力。更为引人注目的是,这种柔性电路不仅仅被动地适应变形,而且能够通过感知人的交互进行主动响应和相应的变形。这种智能化的柔性电路为软体机器人的实时环境感知和主动决策创造了强有力的基础。
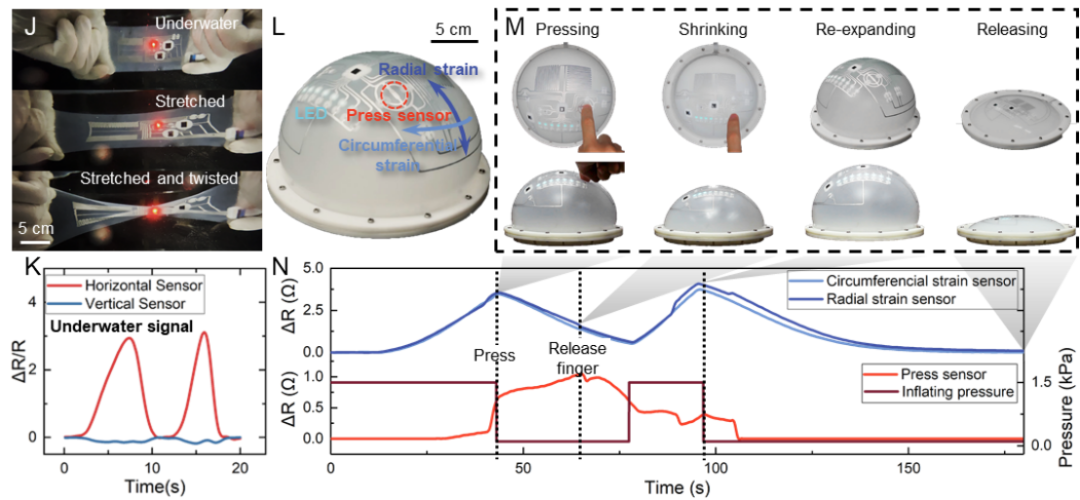
图8:可交互的柔性高延展电子皮肤

三、柔性触觉装置
第三个难关是将仿生机械臂的感知信息准确反馈到人身上,进一步实现自然、直观的人机交互。章鱼即使视力很差,依旧能凭借出色的感知力成为高超的捕食者,研究团队从中汲取灵感,制作了基于大拉伸电子电路的可穿戴柔性触觉装置,用于感知和控制仿生章鱼臂。柔性吸附触觉指套的设计与制作主要由博士生田路峰负责,指套内侧嵌有吸盘结构,当抓持器吸盘吸附上物体时,信号传递到指套,指套内嵌吸盘会产生负压,在手指上同步产生吸附触觉,将机器人触觉传递到人手。柔性指套的引入不仅为用户提供了更直观、自然的控制手段,而且通过无线通信与仿生章鱼触手抓持器实现了高效的协同作业。
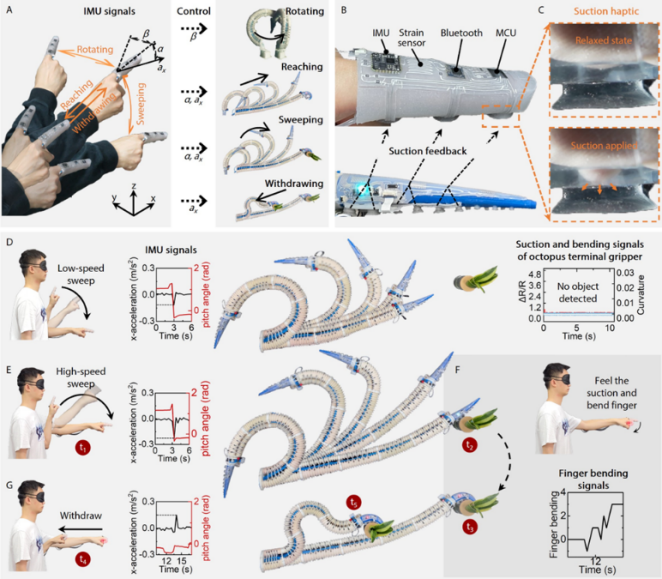
图9:柔性触觉指套控制仿生章鱼触手

持续探索未来应用
功夫不负有心人,一个活灵活现,可以像章鱼一样抓取、决策的仿生机械臂已然完成。然而考虑到水下捕获、咽拭子检测等实际应用场景要求仿生软体机器人能够在更广阔的空间中自由运转,研究团队并未停下探索的脚步。
起初,制成的机械臂只能在二维平面内进行捕获、抓取,在三维空间的实际应用中显得捉襟见肘。章鱼的视力很差,抓捕空间却极大,原因在于章鱼高超的捕食技巧:在感知到物体后,章鱼会控制触手以波传递方式触及物体,扫掠范围大、十分敏捷;一次抓捕方向不正确,会扭头迅速调整方向,进行二次抓捕。受此启发,研究团队巧用轮盘,在仿生机械臂的底部增加了一个自由度,这样便“二维变三维,困途变坦途”。研究团队演示了在人为控制下的水下三维空间内对移动物体的抓捕。
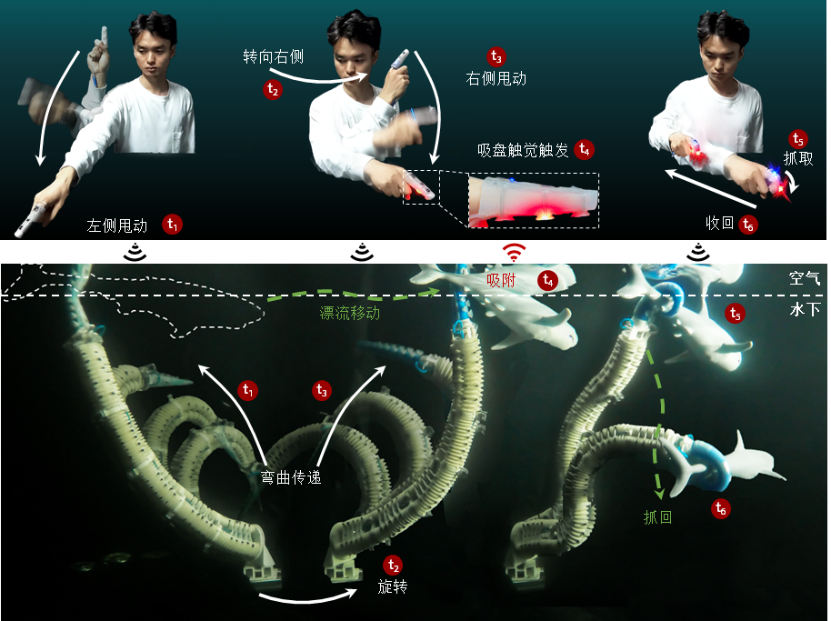

图10、图11:人控制仿生章鱼触手抓持水下移动物体
这项研究建立了软体机器人、人类和环境之间的统一交互模式,并拓宽了可拉伸电子集成的仿生自主系统在大空间内的交互操作方式,为我国柔性机器人的交互式应用提供了新的前景与发展思路。
项目作者及团队信息
这项研究涵盖了多个研究领域,涉及生物学和机器人学等多方面的交叉。谢哲新、袁菲阳、刘嘉琦、田路峰为论文的共同第一作者,北航丁希仑教授、清华大学张一慧教授、新加坡国立大学Cecilia Laschi教授为论文的合作作者。文力为论文的通讯作者。北航为研究论文的第一/通讯单位。本项目得到了国家自然科学基金项目、创新研究群体等项目的支持。
(转自:北京航空航天大学公众号)
