10月21日下午,威廉希尔第十二届大创结题答辩在新主楼A841成功举办。威廉希尔李大寨老师、裴旭老师和梁建宏老师出席指导。

共有5个项目参与本次答辩,其中国家大创项目4项,院级创新训练项目1项。所有项目均顺利结题,以下是对4个国家大创结题项目的简单介绍。
项目1
项目编号:201810006054
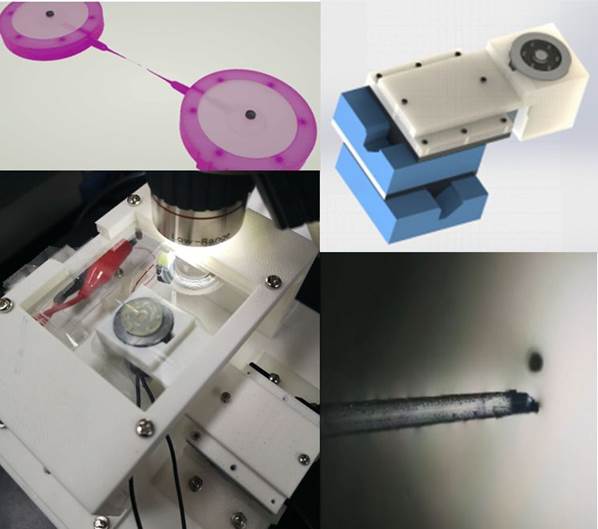
项目名称:芯片内细胞微手术机器人系统研究
立项人:张薇
项目2
项目编号:201810006160
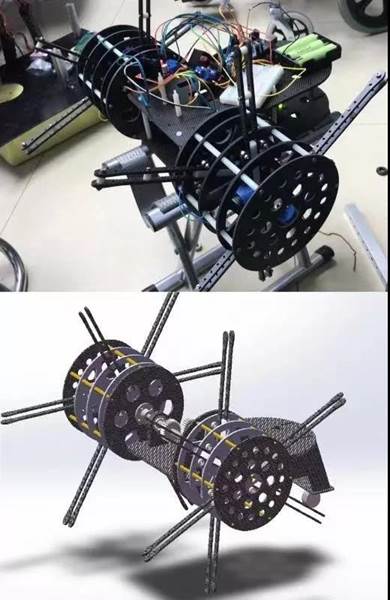
项目名称:适应多种地形的异形轮移动机器人
立项人:李先忠
项目简介:为了提高地面移动机器人的地面适应性和越障能力,在移动机器人机械本体上设计了一种可以该改变轮径和轴心的轮式腿结构。将每条腿设计成杆状,一侧轮分为三层,各层放置一条腿,每条腿之间呈120度分布。当一条腿接触地面时,等价于以轴心为圆心,腿长为半径的轮。如果可以在一定范围内改变腿长,也就相当于改变了轮径。而三层腿均可改变轮径,也就相当于在一定范围内改变轴心。如此设计,达到了提升越障能力的目标。
项目3
项目编号:201810006053
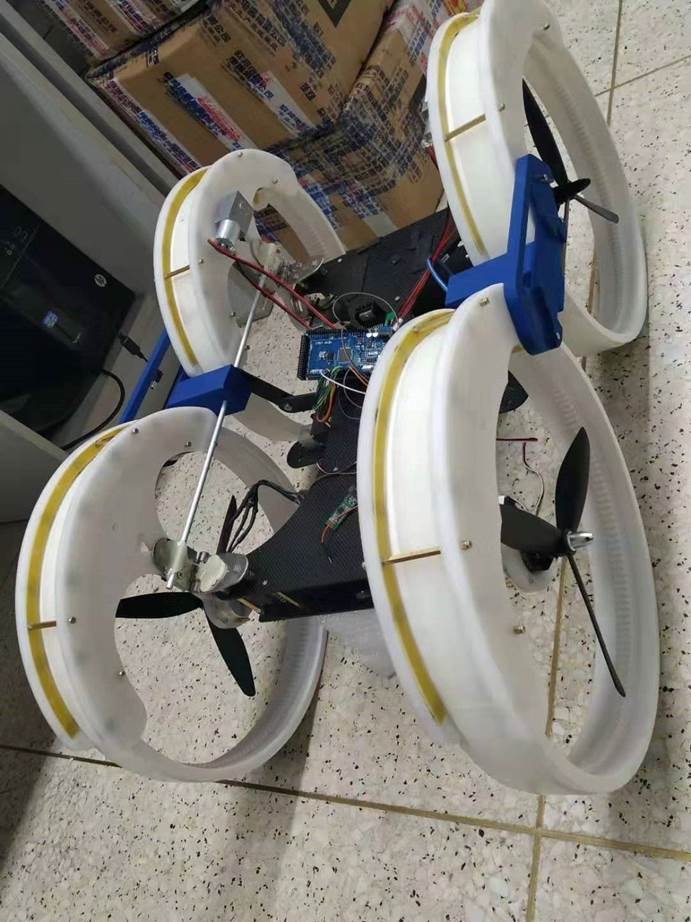
项目名称:多功能综合越障车
立项人:刘金磊
项目简介:当前,四旋翼无人机和陆地越野车的发展已经很成熟。但是,在陆空两栖方面,大部分的设计方案采用分层式,既上层安装螺旋桨,下层安装车轮。这样的简单叠加,限制了车的越野能力,和四旋翼的机动能力。我们的设计采用无轮毂车轮,将螺旋桨布置在轮子之内,变形展开,在越野车与四旋翼之间实现转换。有机结合,保证了车的性能和四旋翼的性能。轮圈不仅为螺旋桨提供了一道外在保护,而且成为了螺旋桨的涵道,提高了效率。这样的结合,优点诸多,是一次陆空两栖结合的新尝试。
项目4
项目编号:201810006146
项目名称:分布式涵道无人机阵列集群
立项人:夏宇辰
项目简介:本项目构想将“涵道式无人机”与“无人机分布式阵列”相结合,选用涵道式无人机进行分布式阵列研究,即可以使分布式无人机阵列的实现更加简单,还可以使每个无人机能够发挥类似细胞单元的作用。

大学生创新创业训练计划旨在促进高等学校转变教育思想观念,改革人才培养模式,强化创新创业能力训练,培养适应创新型国家建设需要的高水平创新人才。期待有更多的机械学子能参与到大学生创新创业训练计划中,实现心中的科技梦想!
